Дискуссия, начатая в предыдущей главе, нуждается в продолжении. Она касалась эвристических методов, которые, как представляется, единственно способны организовать системы, названные нами немыслимыми. Был показан принцип работы устройства управления ими. Это алгедоническая цепь, содержащая алгоритм, порождающий эвристику. Вместе с тем было показано, что необходимый для этого алгоритм можно составить только на метаязыке. Это означает, что необходимо наличие системы второго порядка, связанной и соединённой с первой своей алгедонической цепью. Процесс продолжается до тех пор, пока не образуется командная иерархия, а он может продолжаться бесконечно. Логически можно строго доказать, что вся система в целом требует бесконечного числа метаязыков; и нельзя завершить их создание. Тогда, следовательно, нам рано или поздно придётся остановиться — без всякого логического основания — на наивысшей метасистеме как её вершине. Такой неутешительный вывод не представляет, однако, ничего большего, чем параллель с обычными фактами существования любой организации. В деловом мире отделы координируются подразделениями, подразделения координируются отделениями, а отделения — гигантскими корпорациями. Различные уровни такого управления в значительной степени автономны, а управление ими в основном осуществляется алгедонически. (Об этом подробнее будет сказано в Интересно начать анализ структур иерархического управления, задавшись вопросом о базисных решающих элементах, которые в общем случае формируют и отдают команды. Если рассматривать самую совершенную систему управления в природе — головной мозг человека, то элементарную ячейку управления можно представить в виде отдельной нервной клетки — нейрона. В промышленности или в правительстве, фактически в любой тесно связанной социальной группе, таким элементом является любой начальник, любой руководитель. Как нейрон, так и руководитель призваны выполнять одну единственную фундаментальную роль — решать. В случае нейрона импульс может либо задействовать выходящий из него нерв (аксон), либо нет. Для управляющего фундаментальная задача тоже сводится к тому, чтобы сказать да или нет. Верно, что руководители не тратят всю свою жизнь на произнесение только этих двух слов; они могут вообще никогда их не произносить. Тем не менее в этом их роль, а замены, нюансы типа «могу посоветовать», «вероятно, Вам бы лучше…» — принятые в обществе формы вежливо сказать да или нет. Чтобы выбрать между да и нет, между Сказанное здесь может показаться мелочью. Но я искал описание, которое было бы общим и для руководителя, и для нейрона. И если всё ранее сказанное имеет смысл, то можно перейти к общей теории систем, с тем чтобы описать порог чувствительности как функцию преобразования. Дан набор импульсов, которые, подчиняясь определённому критерию, преобразуются в 0 или 1 на выходе. Поскольку, как было показано в двух предыдущих главах, организации не могут надеяться на детализированное управление событиями сверху, лучше всего рассматривать функцию преобразования как обеспечивающую скромную степень алгедонического одобрения при нормальном состоянии системы. Так, если мы располагаем 20 алгедоническими каналами ввода, то, возможно, в 15 из них установлен уровень 1, когда дела идут нормально. Пять, уровень которых установлен на 0, представляют меру, с которой вся алгедоническая система обратной связи подвержена возможному административному вмешательству. Если события выйдут Предположим, однако, что сама функция преобразования оказалась неверной, то есть неверно учитывающей условия окружающей среды, в которой срабатывает или не срабатывает нейрон или руководитель. Конечно, такое суждение будет сделано метасистемой. Тогда, предположим, функция преобразования должна изменить свой знак, что никуда не годится; мы не можем позволить функции преобразования такого сальто-мортале на выходе, смены результата с 0 на 1 и обратно таким скачком просто потому, что окружающая среда несколько неустойчива. Было бы лучше постепенно изменять порог чувствительности так, чтобы решающий элемент соответственно изменял свою реакцию. Лучше всего понять это, если рассматривать серию суждений, при которых очевидно значимый результат на выходе получается более или менее резко и наблюдаются его последствия. Иначе говоря, сформировать обратную связь, которая приведёт к адаптации самой функции преобразования. Следует отметить, что некоторые условия окружающей среды могут потребовать большей чувствительности нейронов или руководителей, а другие её условия — её уменьшения. Последнее относится к особому случаю теории управления, рассматриваемому в Рассмотрим сенсорное устройство такой машины. У неё 10 контактов, которые собирают данные, передаваемые им из внешнего мира, представленного колесом рулетки. В своё время мы говорили, что таких контактов может быть хоть сотня. Конечно, может быть и любое произвольное число контактов, как угодно разбросанных по сенсориуму. Машина будет В таком случае связь между входом и выходом проследить невозможно. Часть её (периферийная) по характеру дискретная — поток двоичных импульсов поступает (и распространяется) в высшей степени запутанную сеть линий. Проследить всё это достаточно трудно и фактически невозможно, если сеть будет непрерывно изменяться — линии могут атрофироваться или непостижимым образом включаться в работу или выключаться. Однако если их достаточно много, машина продолжит работу. Хуже того, внутриклеточная связь будет прослеживаться только на молекулярном уровне. Практически мы будем иметь дело со статистическим эффектом массы. Наиболее близкое описательное название, которое обозреватель может присвоить этой внутренней части нейрона, могло бы быть «аналоговое устройство», поскольку основной двоичный характер системы потерян. Как бы там ни было, в конечном счёте вся система связи и взаимодействие в ней могли бы служить отличным примером анастомотик ретикулум. Как представляется, реальный живой нейрон выглядит весьма на это похожим. Более того, наше его описание достаточно хорошо соответствует и управляющему. При рассмотрении сути этого замечания опасайтесь путаницы в оценке различий в их разрешающей способности (в оптическом смысле). Мы рассматриваем нейрон (как естественный, так и искусственный) и управляющего как простой элемент решения в сети нейронов (мозг) или как человека (в обществе управляющих). Тот факт, что в мозгу управляющего содержится 10 миллиардов нейронов, не имеет значения для нашего сравнения. Тем не менее это интересное замечание, когда мы приступаем также к рассмотрению иерархии команд. Во всём этом наблюдается удивительная гомогенность, а собственный язык управляющего, очевидно, является метаязыком Кстати, если сенсориум изобретённой нами машины может быть представлен большим, возможно неизвестным, числом входов вместо первичных десяти, алгедоническая цепь сможет успешно работать и на менее точной основе. Мы говорили, что срабатывание цепи алгедонической обратной связи вызовет движение деревянного бруса, при котором контакт, один из десяти, переместится с пластины A на пластину В. Однако если число произвольно разбросанных контактов весьма велико, то это правило становится бессмысленным. Во всяком случае, нет никаких оснований, в силу которых алгедоническое движение должно быть дискретным, осуществляемым небольшими скачками. Давайте представим этот обусловленный процесс как своеобразное давление, под действием которого очень незначительно перемещается деревянный брус, при этом плавно исправляя ошибки. Теперь мы знаем, что алгедоническая функция сама определена метаязыковым решением, Прежде чем переходить к рассмотрению действующих ступеней иерархий, уместно сделать общее замечание. Нас всегда учили представлять командные сети как специально созданные, располагающие узловыми пунктами, действующими в качестве переключателей, зависящими от обратной связи в инженерном смысле (см. Из того, что было до сих пор изложено, вытекает, что нейрофизиологическую и управляющую системы (если взять две жизнеспособные системы, которые, как оказалось, имеют много общего) легче всего понять, представляя именно с учётом сказанного, а их основные элементы — нейрон и управляющего — как работающих в соответствии с моделью, представленной в её самой простой форме деревянно-медной машины. Для облегчения дальнейших ссылок надо её назвать, Нашим следующим шагом будет попытка распространить принцип машины, представленной на Рис.
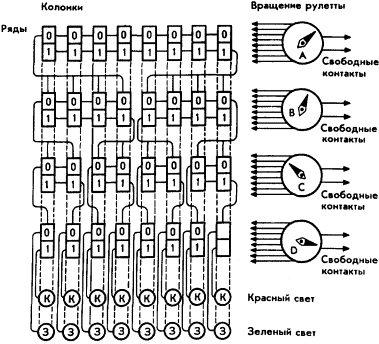
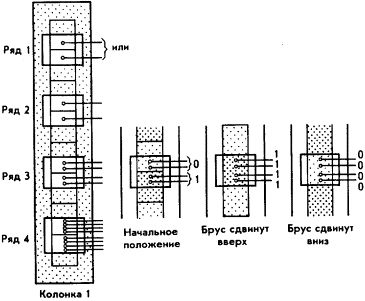
(Никакой мистики в этих числах нет — они выбраны просто для удобства.) Нижний ряд выглядит как восемь отдельных алгедонодов, на их выходе остаётся знакомая нам пара красного и зелёного света. Результат зажигания (выход) теперь кроется в первых трёх рядах, а двоичный выходной результат каждого алгедонода служит для выбора следующей группы элементов, которые тогда будут задействованы. На правой стороне рисунка показаны четыре рулетки в произвольных положениях, каждое из которых представляет неизвестный входной сигнал из внешнего мира. Вращение четырёх, рулеток отражает «состояние внешнего мира». Легко видеть, что если каждое колесо рулетки располагает числами положений от 0 до 9, то общее число выходных состояний составит 10 000. (Представьте себе результат деятельности банка игральных костей, который фиксирует любую цифру между 0000 и 9999.) Имеется восемь контактов, связанных с входом А, на восьми колонках медных полос, и они поочерёдно находятся в состоянии 0 или 1 своего ряда. (Их соединения не показаны на рисунке, поскольку они слишком усложнили бы его, однако позднее они будут приведены на Рис.
Во втором ряду тоже восемь контактов, представляющих случайный вход В. Они организованы так, что состояния как 0, так и 1 отражены каждым алгедонодом в каждой группе из четырёх алгедонодов. Это значит, что у нас всего 16 контактов и любой вход В задействует два из них — один в левой и один в правой группе. Однако решение первого ряда уже исключило одну из групп. Тогда ряд 2 задействует пару алгедонодов в ряду 3 либо через эту систему, либо (как и прежде) напрямую через два свободных входа. Для выбора остаются две пары либо из правой, либо из левой двойной группы в зависимости от решения ряда 2. Какая из этих пар будет задействована, зависит от положения рулетки С. В ряду 3 у нас четыре контакта к каждому из алгедонодов — два в положении 0 и два в положении 1, снова организованных в параллель. Таким образом, к ряду 3 сработают 32 контакта и только восемь из них (плюс два свободных для входа С) имеют отношение к третьему решению, поскольку три из четырёх пар ряда 3 уже исключены. Ряд 3 теперь определит, какой из алгедонодов в ряду 4 будет задействован. Ряд 4 принимает окончательное решение, основанное на положении рулетки D. На этот раз все восемь контактов организованы в параллель на каждом алгедоноде (к этому моменту, следовательно, состоится 64 соединения), четыре из которых в положении 0 и четыре в положении 1. Ряд 3 решает, какую колонку задействовать, а ряд 4 решает, будет ли зажжён зелёный или красный свет. Повторим, что два резервных импульса, на этот раз от рулетки D, будут проходить прямо к той или другой лампочке. Поскольку согласно исходным условиям весь наш ретикулум основан на 32 алгедонодах, предлагающих равное число значений Чтобы заставить такую машину работать как электромеханическое устройство, потребуются «принимающие решения» реле, а эти реле будут срабатывать при совпадении поступления входного импульса данного ряда с выходным импульсом, определённым в предыдущем ряду. Одно реле необходимо как выходное для ряда 1; оно будет осуществлять подключение к одной из двух групп алгедонодов в ряду 2. Выходной результат рядов Хорошо сказать «может управлять», подразумевая, что ретикулум, связывающий вход и выход, не перегружен, что он может отличать один набор реакций от другого. Но выражение «может управлять» до сих пор означало «производить случайный результат», а для этого не стоило бы создавать такую машину. Следующим шагом будет соединение алгедонодов вместе по колонкам. Одна вертикальная колонка такой машины приведена на Рис. Теперь становится возможной работа цепи алгедонической обратной связи. Для начала рассмотрим её в самом общем виде. Если зажигается не та лампочка, которая нужна, наказание будет суровым. Вся медная полоса, которая обеспечила подобный результат в ряду 4, будет исключена и во всех остальных рядах, принадлежащих данной колонке. Но не будет изменений в соседних колонках, поскольку в них полосы не передвигали. Следовательно, баланс вероятностей состояний всей машины изменится весьма интересным образом. Рассмотрим только одну пару лампочек — ту, которая зажигается колонкой алгедонода ряда 4. Вероятность того, что, к примеру, загорится красная лампочка, составит теперь 9:1. (Все восемь контактов находятся на одной медной пластине, один запасной канал ввода соединён непосредственно с красной лампочкой, а другой — с зелёной.) Однако вероятность того, что этот полностью адаптировавшийся алгедонод (ряд 4 в колонке 1) будет вообще выбран, тоже изменилась. Его выбор производится алгедонодами ряда 3 из колонок Продвигаясь в обратном порядке по дереву решений, подойдём к ряду 2, который содержит четвёрку алгедонодов. Здесь первично решение принималось с помощью восьми контактов, соединённых с восемью зонами (четыре нуля и четыре единицы), но теперь баланс нарушен так, что там, где были нули, и там, где были единицы, в колонке 1 считываются только нули. Теперь у нас пять нулевых и три единичных зоны. С учётом свободных каналов вероятность выбора в этом случае станет равной 6:4. Переходя к ряду 1 и рассматривая вероятность, с которой будет выбрана эта четвёрка в ряду 2, мы столкнёмся с 16 медными зонами, из которых только восемь касаются контактов. Такое положение формально эквивалентно тому, что было в ряду 2. Теперь становится понятным, каковы вероятности всего дерева решений, определяющих включение лампочек колонки 1. В начальном положении каждый ряд обусловливает вероятность 0,5 того что загорится в конечном счёте красная лампочка. Вероятность того что это так и будет, составляет, следовательно, 0,54 = 0,0625 или одну шестнадцатую. Поскольку у нас всего 16 лампочек и исходное состояние машины равно вероятно, именно этого следовало ожидать. Но после того, как мы произвели грубую алгедоническую настройку в колонке 1, вероятности стали равными: 0,6 для ряда 1, 0,6 для ряда 2, 0,7 для ряд в Дальнейшее понимание того, что происходит, становится довольно затруднительным. Грубая алгедоническая обратная связь в колонке 2 на втором туре игры даст вероятность 9:1 зажигания нужной лампочки в ряду 4. Но, поскольку ряд 2 выбрал левую пару алгедонода в ряду 3, мы получим вероятность 0,9 правильного ответа в общем так как неважно, выберет ли ряд 3 колонку 1 или 2 в ряду 4. Более того, поскольку алгедоническая обратная связь приводит к усилению (или ослаблению) её эффекта по всей иерархии, ряд 1 наиболее вероятно выберет левую четвёрку в ряду 2, а он наиболее вероятно выберет левую пару в ряду 3. Не имеет смысла дальше описывать теоретическое изменение вероятностей в этой машине, поскольку мы уже слишком упростили это и без того простое устройство. Если алгедоническая обратная связь не очень груба ( Если это понятно, то возникает следующий вопрос: как такая машина может стать полезной? Таково то, о чём мы должны подумать в терминах значительно более совершенной техники. Перед нами две альтернативы, и выбор между ними, как увидим позже, весьма важен. Первая связана с программированием универсальной ЭВМ, обеспечивающим именно такое её поведение. Вторая связана с созданием специальной системы, использующей физику твёрдого тела. Но значительно важнее, чем все эти технические средства, признание существования алгедонодов, поскольку именно такого рода сложные перестановки производятся внутри групп управляющих — с использованием людей в качестве элементов. | |||||
Оглавление | |||||
|---|---|---|---|---|---|
| |||||