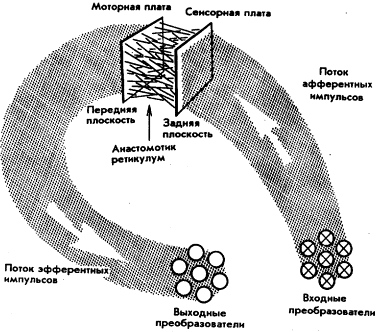
Чтобы понять сущность кибернетики больших систем управления, нам неизбежно придётся порвать с общим стилем мышления, использованным в Первый принцип управления сводится к тому, что управляющий является частью управляемой им системы. Управляющий не является человеком, посаженным над системой высшей властью, который в дальнейшем реализует свои полномочия. В любой системе, говорим ли мы о популяции животных или внутренних функциях живого организма, функции управления распределены по всей её архитектуре. Управление совершенно невозможно отделить от организма, но его существование вытекает из поведения самой системы. Более того, управление совершенствуется с ростом системы, и если оглянуться на историю, то станет видно, что и управляющий развивался вместе с системой. По этой причине лучше спрашивать о том, как система узнает о себе и своём состоянии, чем спрашивать, как то же самое узнает управляющий. Я полагаю, что нам не следует рисковать, отождествляя систему с личностью или с Подобное объяснение вызывает новый вопрос: что считать ответом на стимулы? Если мы вмешаемся в работу автомобильного двигателя, выключив зажигание, то будет ли верным заявить, что система реагировала остановом? Нет, поскольку мы разрушили динамическую систему, изучаемую нами, а не внесли в неё стимулы. Если мы выстрелом ранили животное, оно умрёт по той же причине. В равной мере если мы бросили спичку на блок цилиндров автомобильного мотора или на спину слону, то ничего не произойдёт. На этот раз потому, что наше вмешательство нельзя признать стимулом. Нетрудно уловить смысл сказанного. Ясно, что за стимул следует принимать такое вмешательство, которое так или иначе отразится на действиях системы, будучи не слишком незначительным, чтобы не отразиться на её деятельности, и не слишком сильным, чтобы её разрушить. За реакцию системы примем некоторое её изменение, имеющее смысл только результата воздействия использованного стимула. Если система изменится произвольно при введении в неё того, что мы приняли за стимул, то, вероятно, Из этого рассуждения вытекает несколько важных принципов управления. Стимулом является то, что изменяет работу системы. Реакция системы есть её действие, которое должно интерпретироваться в качестве следствия стимулов. В общем, это означает, что система избегает стимулов или В физике, генетике, социальных науках мы полагаемся на описания и даже на законы, которые основаны на равной вероятности случайностей. Только в специальных или искусственно созданных областях, таких как инженер не может создать машину или какую-либо конструкцию, защищённую от неизвестных, непредвиденных помех, но может создать защищённую только от тех, которые указаны заранее. Нам говорят, что мы должны определить, что считается стабильной работой машины, а затем перечислить по порядку помехи, которые считаются нарушающими стабильность её работы. Тогда и только тогда мы будем в состоянии создать или запрограммировать систему, которая «правильно» воспримет помеху в её работе. Всё это неверно. То, в чём действительно нуждается система, и это все, в чём она нуждается, так это в способе измерения её собственной внутренней тенденции отклоняться от стабильного состояния, а также в наборе правил проведения экспериментальной проверки её реакций, которые возвращают её к внутреннему равновесию. Следовательно, нет нужды знать наперёд, что вызовет нарушение работы системы, как нет нужды знать, что её нарушило. Вполне достаточно быть уверенным в том, что Система, которая может выполнить это, которая может справиться со случайным и непредвиденным вмешательством, известна в кибернетике как сверхстабильная система (по классификации Эшби). Например, можно представить себе устойчиво работающий компьютер, который в случае пожара в здании будет продолжать отщелкивать цифры, даже когда начнут плавиться его части. Можно подумать, что для защиты от подобного риска конструктор должен установить температурные датчики. Ничего подобного. Любой ультраустойчивый компьютер должен обнаруживать не пожар (обходиться без термометров), а «нарушение работы», поскольку внутреннее контрольное устройство должно показывать, что счёт стал неверен. Компьютеру тогда следовало бы привести в движение свои колеса и просто покинуть горящее здание. В таком случае люди могут подумать, что компьютер в состоянии «почуять» пожар, и вновь ошибутся. Разумное поведение часто основывается на простых механизмах, вроде только что упомянутого, которые вводят нас в заблуждение, заставляя думать, что они основаны на более глубоком понимании обстоятельств. Простейшая версия управляющего устройства, управляющей функции системы, которую можно себе представить, выглядит тогда так, как показано на Рис. Сенсорное устройство (прямоугольник на Рис. Чтобы выбрать положение переключателя (точку А или В), управляющее устройство должно сравнить ожидаемый результат эффекта своего выбора по критерию стабильности системы. Его простейшая стратегия для этого заключается в том, чтобы двинуться немного в сторону уменьшения, а затем немного в сторону усиления стимула, сопоставить получаемые результаты по своим критериям и затем твёрдо установить переключатель. Если система будет экспериментировать слишком долго, то она начнёт раскачиваться. В технике это называется рысканием, в психологии — атаксией. Все системы подвержены этой болезни. Если таково простейшее устройство управления, то теперь следует убедиться в том, что мы достаточно глубоко понимаем это, и овладеть основной терминологией, обходимой для её изучения. 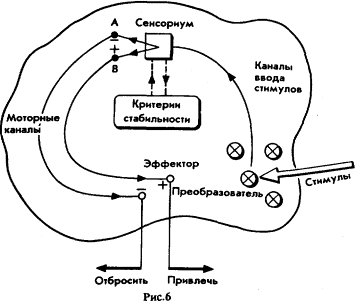 Стимулы, как было показано, возникают вне системы. Стимул может возникнуть и по внутренним причинам, но наше утверждение сохраняет силу — должно быть устройство, регистрирующее, что Когда преобразователь сработал, сообщение о стимуле поступило в систему. Канал, по которому сообщение о стимулах поступает в систему, называется сенсорным каналом ввода. Эти сообщения являются сенсорными входными данными. Другая половина цепи управления, её замыкающая, является моторным каналом выхода (МОС). Соответствующий «мотор» связан с выходом, потому что выходные данные имеют смысл постольку, поскольку выходной сигнал вызывает действия. Например, в психологии нервы, представляющие выходные каналы, как говорят, передают «эффекторные» импульсы [которые могут быть стимулирующими либо ингибиторными (подавляющими): или +, или], тогда как сенсорный выход является «аффекторным». Таким образом, моторный выход ведёт к эффектам (пустая цепь на Рис. Действующие в реальной жизни системы управления, конечно, намного богаче; масса импульсов пробегает через огромное число входных и выходных каналов. Это справедливо как в отношении организма человека, так В частном случае управления техническими средствами такая процедура переключения вполне понятна. Закономерность, отображающая такую процедуру, известна как функция преобразования, поскольку она математически указывает, какого сорта преобразования происходят между сенсорными и моторными узлами в цепи управления. Функция преобразования математически описывается дифференциальным уравнением и может быть весьма сложной. Сложность возникает потому, что характер реакции системы часто определяется диапазоном стимулирования, вызванного данным стимулом или частотой, с которой происходит стимулирование. В живых системах управления самым наглядным примером осуществления функции преобразования является деятельность нейрона или отдельной нервной клетки. Как утверждает Маккулох, функция преобразования в этом случае будет весьма сложной и описывается нелинейным дифференциальным уравнением восьмого порядка. Мозг человека состоит, вероятно, из 10 000 000 000 нейронов, и, насколько мы знаем, нет двух из них, функции преобразования которых были бы одинаковы. Мы столкнёмся с проблемой именно такого порядка при обсуждении функции преобразования руководителя. Решение, принимаемое в деловом мире, может касаться десятка руководителей, но это просто в сравнении с несколькими тысячами нейронов, функцию преобразования, управляющую нейронами, совершенно невозможно составить (если бы в этом было дело), поскольку она есть некоторая сумма взаимодействующих нейронов мозга. И нам это известно. Дальнейшее ещё сложнее. При рассмотрении управления системой я целом, что является нашей конечной целью, мы вполне можем столкнуться с тем, что не удастся даже опознать отдельные входные и выходные каналы, а удастся идентифицировать лишьих целые связки ещё меньше наши возможности в отношении идентификации индивидуальных переключателей, преобразующие функции которых по этой причине не могут быть исследованы и ещё менее могут быть измерены. Тому есть существенные причины, обусловленные физиологическими структурами, такими как нервная система, Весьма важно усвоить это замечание об анастомотик ретикулум, поскольку процесс принятия решения как в организме человека, так В этих условиях разумно перейти к электрической модели и попытаться построить систему переключателей, лежащую в основе цепи принятия решений. Более того, при рассмотрении Рис.
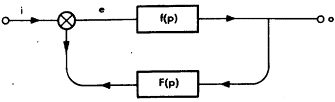
Применительно к этому новому варианту модели важно подчеркнуть следующее: стимулы возбуждают целую колонию входных преобразователей или сенсоров, а реакция системы осуществляется через целую колонию выходных преобразователей (или эффекторов). Оба этих набора преобразователей служат передатчиками импульсов через множество каналов. Сенсориум и связанный с ним переключатель заменены своего рода коробкой, имеющей сенсорную панель сзади и моторную панель спереди. Эти панели соединены своеобразной сетью переключающей системы, которую мы назвали анастомотик ретикулум. Всё сказанное в этой главе до сих пор касалось управления большими комплексными системами исходя из первых принципов, хотя введённые термины имели явно биологический оттенок. Был упомянут также инженер-автоматчик, но в основном с тем, чтобы сказать, что он не в состоянии В системе есть входные и выходные сигналы. То, что происходит внутри системы и превращает первое во второе, уже было названо преобразованием и описывается функцией преобразования. В технике управления, как говорилось, функция преобразования описывается дифференциальным уравнением, которое определяет скорость преобразования во времени входных величин в выходные. Оператор в этом преобразовании обычно обозначается буквой «р». Нет необходимости детализировать это уравнение, достаточно упомянуть, что оно в общем является функцией оператора р. Как говорилось ранее, функция преобразования нейрона может быть достаточно хорошо описана нелинейным дифференциальным уравнением восьмого порядка, однако её тоже можно записать как В технике управления существуют методы точного определения дифференциального уравнения функции Однако мы должны вернуться к инженеру-автоматчику и его сервомеханизму, как называется его прибор управления. Инженер знает входную, выходную переменные и функцию преобразования для своей системы. Стоящая перед ним задача сводится к следующему: выходной результат системы может не полностью соответствовать тому, который ему нужен. Предположим, например, что при устойчивой входной переменной функция преобразования даёт устойчивую выходную переменную, которая точно соответствует желаемой. Пусть теперь входная переменная начнёт регулярно изменяться — что произойдёт с выходной величиной? Она может следовать за входной, поскольку предполагалось, что выходная величина должна быть постоянной. Хуже того, выходная величина, будучи поданной на вход, может усиливать колебания в системе и дать сильное раскачивание, опасное для следующей системы, выходная величина данной системы для которой является её входной величиной. Что бы ни случилось, во всяком случае, можно измерить текущие изменения значений переменной на выходе и сравнить их с ожидаемыми. Полученные при таком измерении результаты выявят отклонения системы от нормы. Именно такие измеренные величины, которые могут быть несколько видоизменены, подаются обратно с целью регулировки входной величины так, чтобы при существующей функции преобразования была сформирована правильная выходная величина. Представим себе такой простой цифровой пример: пусть функция преобразования удваивает входную величину. Пусть в данный момент значение на входе равно 3, тогда на входе будет 6, а 6 и есть то, что мы хотим. Представим теперь, что по неизвестной нам заранее причине значение на выходе внезапно стало равным 8. Тогда отклонение на 2 будет воспринято как изменение значения на выходе, а отсюда следует, что значение на входе по той или иной причине по своему эффекту стало равно 4. Цепь обратной связи воспримет как свою входную величину отклонение выходной величины (на 2 единицы) и теперь должна сработать при таком его значении. Если она просто направит обратно отклонение в 2 единицы как поправку на вход в систему, то теперь при его, как мы помним, значении, равном 4, на входе останется только 2. Функция преобразования его удвоит, и новое значение на выходе станет равным 4 вместо 6. Ясно, что цепь обратной связи нуждается в своей собственной функции преобразования, которая снизит первичное отклонение выходной величины с 2 до 1 и заставит первичное отклонение на входе снизиться на это значение. Тогда выходное значение системы возвратится к требуемой цифре б, поскольку входная величина теперь исправлена на 3. Этот пример хорошо демонстрирует механизм действия отрицательной обратной связи, исправляющей ошибку, но он с дефектом. Мы заморозили систему, чтобы рассмотреть фактические показатели, а затем позволили ей работать снова на конечном интервале времени, необходимом для срабатывания обратной связи. Однако причиной всех неприятностей является неожиданное изменение входного сигнала, и, вероятнее всего, он изменится снова к моменту проведения корректирующих действий. Тогда то, что произойдёт за время отклонения и введения в систему обратной связи, сложнее, чем просто изменение на обратное значение первичной функции преобразования. Если бы это была единичная операция, то легко было бы видеть, что систематическое изменение входной величины, которое происходит в фазе с временным циклом обратной связи, будет не подавлено, а усилено. Наш механизм обратной связи обнаружит первичное отклонение +2, и снижение входной величины на единицу последует точно в момент, когда на входе будет импульс, приводящий в результате к отклонению на —2. Иначе говоря, на входе останется величина 2, что генерирует 4 скорее, чем 6. Тут начнёт действовать обратная связь, считывающая первое (позитивное) отклонение, и снизит входное значение с 2 до 1. Теперь на выходе останется 2 вместо 6, что ещё хуже. Из этого следует, что в цепи обратной связи должна быть обеспечена своя собственная функция преобразования, которая может быть записана как Чтобы уяснить различие между первичной функцией преобразования
Теперь обратимся к схеме простого сервомеханизма (Рис. Если это так, то форма функции преобразования первичной системы изменится. Первоначально мы её записали как Поскольку на входе блока Из данного уравнения следует несколько выводов. Рассмотрим произведение функций обратной связи первичной цепи и цепи обратной связи, а именно Во-вторых, весьма интересен результат действия отрицательной обратной связи. Корректирующая обратная связь по необходимости должна быть отрицательной, если любое отклонение от заданной нормы считается по его абсолютному значению положительным. Тогда уравнение для е должно быть переписано как Анализируя это уравнение, можно определить, что происходит, если значение функции преобразования первичной цепи становится очень большой величиной. При значении Результат поразителен. У нас может быть очень слабый сигнал на входе, как это часто случается в биологических и управляющих ситуациях. Мы можем сильно усиливать этот сигнал в первичной цепи, и это часто случается. Тогда можно предположить, что любой «шум» на входе, то есть по смыслу любая неверная информация на входе, станет также сильно усиливаться. Но поскольку в системе в целом преобладает влияние не первичной цепи, не первичной системы, а системы обратной связи, то именно она обеспечит на выходе сигнал, значительно «чище», чем можно было ожидать. Таким образом, мы оказываемся на пути к достижению желаемого качества системы — её сверхустойчивости. Отрицательная обратная связь во всех случаях корректирует величину на выходе в соответствии с флуктуациями на входе. Неважно, какого сорта шум действует на систему, как он велик по сравнению с входным сигналом, насколько он хаотичен и почему возник. Система стремится подавить его влияние. Примечание. Результат решения последнего уравнения интересен и важен для понимания сверхустойчивости. Используемая здесь математика проста несмотря на введение уравнений, а аргументация понятна каждому, знакомому со школьной алгеброй. Тем не менее некоторые читатели не понимают, ни как получено уравнение для f [p] = Из [1] следует, что о = Подстановка в [2] даёт Используя результат [3] Подставляя значение о Сократив е в числителе и | |||||
Оглавление | |||||
|---|---|---|---|---|---|
| |||||